
Движение по окружности с постоянной по модулю скоростью
При данном движении вектор скорости имеет постоянный модуль и направлен по касательной к окружности, которая является траекторией тела
Важно понимать, что скорость постоянна по модулю, но в каждый момент времени меняет свое направление. Поэтому данное движение нельзя назвать равномерным
Ускорение, изменяющее направление скорости при данном виде движения, называется центростремительным ускорением. Оно постоянно по модулю и направлено к центру окружности:
Формула зависимости центростремительного ускорения от линейной скорости (то есть скорости, с которой тело двигается по своей траектории) и от радиуса окружности следующая:
Aцс = v2 / R
Движение тела по окружности с постоянной линейной скоростью является периодическим движением, так как оно повторяется через одинаковые промежутки времени. Время, за которое тело совершает полный оборот по окружности, в данном случае называется периодом вращения Т. Формула зависимости периода вращения от числа оборотов N и времени t, за которое эти обороты были выполнены, следующая:
Т = t / N.
Величина, обратная периоду, называется частотой вращения. Обычно она обозначается греческой буквой «ню» ν (буква очень похожа на строчную латинскую букву «v», и их часто путают). Формулы связи частоты с периодом выглядят следующим образом:
Т = 1 / ν ; ν = 1 / Т; ν = N / t.
Линейная скорость (то есть скорость, с которой тело двигается по окружности) в каждый момент времени направлена по касательной в окружности. Она рассчитывается по формуле:
![]()
Кроме линейной скорости, при движении по окружности существует ещё и угловая скорость, представляющая собой угол, на который тело поворачивается за единицу времени. Обычно угловая скорость обозначается греческой буквой «омега» ω. Рассчитывается угловая скорость по формуле:
![]()
Формулы взаимосвязи характеристик движения тела по окружности выглядят следующим образом:
![]()
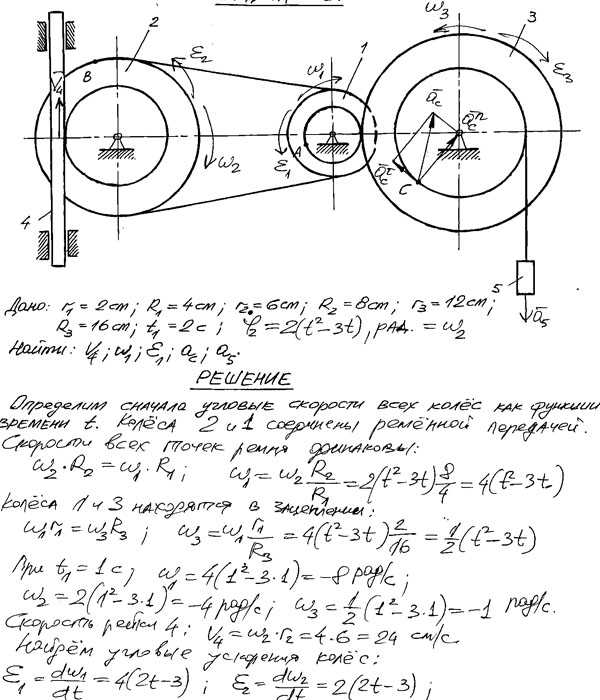
Если два тела двигаются по окружности с одинаковой угловой скоростью, то линейная скорость будет больше у того тела, которое находится дальше от центра окружности. При этом справедливы следующие соотношения:
Если два диска (или шестеренки) сцеплены ободами, то линейные скорости у точек, лежащих на ободах, будут одинаковы, но угловые скорости будут разными. При этом справедливы следующие соотношения:
Если колесо катится по горизонтальной плоскости с постоянной скоростью, то все точки обода будут иметь относительно центра колеса одинаковую угловую скорость.
Если центр колеса двигается относительно земли со скоростью v1, то все точки обода двигаются относительно центра колеса с линейной скоростью v1. Но относительно дороги каждая точка обода имеет разную мгновенную скорость. Точка соприкосновения с землёй (m) имеет нулевую скорость относительно земли, точка (n), диаметрально противоположная точке m, имеет относительно земли скорость 2 v1. Скорости всех точек обода относительно земли определяются по правилу сложения векторов: линейной скорости относительно центра колеса и скорости движения самого центра относительно земли.
Основные понятия и законы динамики
Часть механики, изучающая причины, вызвавшие ускорение тел, называется динамикой
Первый закон Ньютона:
Cуществуют такие системы отсчёта, относительно которых тело сохраняет свою скорость постоянной или покоится, если на него не действуют другие тела или действие других тел скомпенсировано.
Свойство тела сохранять состояние покоя или равномерного прямолинейного движения при уравновешенных внешних силах, действующих на него, называется инертностью. Явление сохранения скорости тела при уравновешенных внешних силах называют инерцией. Инерциальными системами отсчёта называют системы, в которых выполняется первый закон Ньютона.
Принцип относительности Галилея:во всех инерциальных системах отсчёта при одинаковых начальных условиях все механические явления протекают одинаково, т.е. подчиняются одинаковым законамМасса — это мера инертности телаСила — это количественная мера взаимодействия тел.
Второй закон Ньютона:Сила, действующая на тело, равна произведению массы тела на ускорение, сообщаемое этой силой:
$F{→} = m⋅a{→}$
Сложение сил заключается в нахождении равнодействующей нескольких сил, которая производит такое же действие, как и несколько одновременно действующих сил.
Третий закон Ньютона: Силы, с которыми два тела действуют друг на друга, расположены на одной прямой, равны по модулю и противоположны по направлению:
$F_1{→} = -F_2{→} $
III закон Ньютона подчёркивает, что действие тел друг на друга носит характер взаимодействия. Если тело A действует на тело B, то и тело B действует на тело
A (см. рис.).
Или короче, сила действия равна силе противодействия. Часто возникает вопрос: почему лошадь тянет сани, если эти тела взаимодействуют с равными силами? Это возможно только за счёт взаимодействия с третьим телом — Землёй. Сила, с которой копыта упираются в землю, должна быть больше, чем сила трения саней о землю. Иначе копыта будут проскальзывать, и лошадь не сдвинется с места.
Если тело подвергнуть деформации, то возникают силы, препятствующие этой деформации. Такие силы называют силами упругости.
Закон Гука записывают в виде
где k — жёсткость пружины, x — деформация тела. Знак «−» указывает, что сила и деформация направлены в разные стороны.
При движении тел друг относительно друга возникают силы, препятствующие движению. Эти силы называются силами трения. Различают трение покоя и трение скольжения. Сила трения скольжения подсчитывается по формуле
где N — сила реакции опоры, µ — коэффициент трения.
Эта сила не зависит от площади трущихся тел. Коэффициент трения зависит от материала, из которого сделаны тела, и качества обработки их поверхности.
Трение покоя возникает, если тела не перемещаются друг относительно друга. Сила трения покоя может меняться от нуля до некоторого максимального значенияГравитационными силами называют силы, с которыми любые два тела притягиваются друг к другу.
Закон всемирного тяготения:Весом телаСила тяжестиНевесомостьюИскусственный спутник ЗемлиПервая космическая скорость
1.3. Основные понятия и законы статики и гидростатики
устойчивое, неустойчивое и безразличное.устойчивое равновесие.неустойчивое положениебезразличноеПлечом силыУсловие равновесия рычага:Давлениемзакон Паскаля:Гидравлический прессA1 = A2.силой Архимедазакон АрхимедажидкпогрУсловие плавания тела
1.4. Законы сохранения
Импульсом телаимпульсом силы.закон сохранения импульсаМеханической работойМощностьэнергией.кинетическую и потенциальную.кинетической энергией.потенциальной энергией.Энергия сжатой пружины:механическую энергию.закон сохранения механической энергии
1.5. Механические колебания и волны
КолебаниямиГармоническими колебаниямиамплитудой колебанийПериодом TЧастотой периодических колебаний-1Математическим маятникомПериод колебаний математического маятникаПериод колебаний груза на пружинеРаспространение колебаний в упругих средах.поперечнойпродольнойДлиной волныЗвуковыми волнами
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и ), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
На рис. 1.1:
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
График скорости
График скорости — это график функции, описывающей зависимость скорости от времени v(t). При равномерном прямолинейном движении график скорости представляет собой прямую линию, идущую параллельно оси времени:
При равномерном прямолинейном движении рассчитывается как произведение скорости на время:
График проекции перемещения на координатную ось (например, абсцисс) — это график функциональной зависимости проекции перемещения на соответствующую ось от времени. Например, при равномерном движении прямые линии выходят из начала координат:
Линия 1 — тело движется в положительном направлении оси абсцисс.
Линии 2 и 3 — тело движется в отрицательном направлении оси абсцисс.
Площадь фигуры под графиком скорости — это путь, пройденный телом за время t:
При равномерном движении тела соответствующие координаты рассчитываются по формуле (вместо индекса х можно подставлять нужные оси):
По графику координаты можно определять проекцию скорости:
График 1: v1x = tg α, тело движется в положительном направлении оси абсцисс.
График 2: v2x = 0, тело покоится.
График 3: v3x = tg β , тело движется в отрицательном направлении оси абсцисс.
Равноускоренное прямолинейное движение
При равноускоренном прямолинейном движении тело двигается по прямой с постоянным ускорением:
Скорость в некоторый момент времени t рассчитывается по формуле:
Если направление ускорения совпадает с направлением начальной скорости и с положительным направлением оси абсцисс, то проекция скорости рассчитывается по формуле:
![]()
Если же ускорение направлено в противоположную сторону, тогда рассчитывается по следующей формуле:
![]()
График проекции скорости — это график функциональной зависимости проекции скорости от времени v(t):
График 1: а1x = tg α, тело движется равноускоренно в положительном направлении оси абсцисс.
График 2: а2x = tg β, тело движется равнозамедленно в положительном направлении оси абсцисс.
График 3: а3x = tg β, тело движется равноускоренно в отрицательном направлении оси абсцисс.
Формулы для расчёта перемещения при равноускоренном движении имеют вид:
В определенную n-ю секунду тело совершает перемещение, которое можно рассчитать по формуле:
Формула для расчета координаты имеет вид:
Ускорение. Касательное ускорение. Центростремительное ускорение
Продолжая речь о телах, движущихся неравномерно, необходимо сказать о такой физической величине, как ускорение.
![]()
Единицы измерения ускорения:
![]() Рисунок 6 – Тело перемещается из точки 1 в точку 2 (в верхнем правом углу дана иллюстрация к разности векторов)
Рисунок 6 – Тело перемещается из точки 1 в точку 2 (в верхнем правом углу дана иллюстрация к разности векторов)
Если скорость тела меняется не равномерно на выбранном участке пути, нужно поступить так же, как и в случае с поиском мгновенной скорости: разделить на маленькие отрезки времени и рассматривать ускорение на каждом из них.
Поскольку ускорение получается из разности векторов скорости (конечной и начальной), в общем случае оно будет направлено под некоторым углом к мгновенной скорости (а, следовательно, и к вектору перемещения, и к касательной к траектории).
![]() Рисунок 7 – Полное, касательно и центростремительное ускорение тела, движущегося из точки 1 в точку 2
Рисунок 7 – Полное, касательно и центростремительное ускорение тела, движущегося из точки 1 в точку 2
Виды механического движения
В кинематике в зависимости от характера выделяют следующие виды механического движения:
- поступательное — все точки тела описывают одинаковые траектории, если в теле провести прямую, то при движении она остается параллельной сама себе;
- вращательное — все точки тела описывают окружности, лежащие в параллельных друг другу плоскостях;
- колебательное — движение через некоторые промежутки времени повторяется в противоположном направлении.
В зависимости от вида траектории движение подразделяется на типы:
- прямолинейное — траектория представляет собой прямую линию;
- криволинейное — траектория не является прямой линией.
В зависимости от особенностей скорости движение подразделяется так:
- равномерное — скорость постоянна на протяжении всего движения;
- неравномерное — скорость во время движения не является постоянной.
В зависимости от ускорения движение подразделяется следующим образом:
- равноускоренное — ускорение при движении остается постоянным;
- равнозамедленное — ускорение постоянно и направлено так, что скорость уменьшается.
Параметры механического движения зависят от системы отсчёта. В этом проявляется относительность механического движения.
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения (см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Sx = AxBx
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
Sx = x – x
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Sy = y – y Sz = z – z
Здесь x, y, z — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х и у, то есть А(х, у). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
Sx = x – x Sy = y – y
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
АС = sx CB = sy
По теореме Пифагора
S2 = Sx2 + Sy2
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Равномерное движение точки по окружности
Центростремительное ускорение
Представим себе равномерное движение по окружности: во время этого типа движения скорость не меняется по модулю, однако меняется по направлению (см. рисунок 12).
![]() Рисунок 12 – Изменение направления скорости при равномерном движении по окружности
Рисунок 12 – Изменение направления скорости при равномерном движении по окружности
За изменение направления скорости отвечает центростремительное ускорение ( Оно, так же как и скорость, постоянно по модулю, но меняется по направлению – в любой точке окружности оно направлено к ее центру. Центростремительное ускорение можно найти по формуле:
где R – радиус окружности, по которой циклически движется тело.
Пример решения задачи
Теперь, когда мы рассмотрели физические основы кинематики, пора закрепить знания на практике и решить какую-нибудь задачу. Причем, чем быстрее, тем лучше.
Кстати! Для всех наших читателей сейчас действует скидка 10% на любой вид работы.
Решим такую задачу: точка движется по окружности радиусом 4 метра. Закон ее движения выражается уравнением S=A+Bt^2. А=8м, В=-2м/с^2. В какой момент времени нормальное ускорение точки равно 9 м/с^2? Найти скорость, тангенциальное и полное ускорение точки для этого момента времени.
Решение: мы знаем, что для того, чтобы найти скорость нужно взять первую производную по времени от закона движения, а нормальное ускорение равняется частному квадрата скорости и радиуса окружности, по которой точка движется. Вооружившись этими знаниями, найдем искомые величины.
Кинематика как раздел механики
Движение и энергия – это формы существования материи. В Природе действуют законы сохранения – энергия не может исчезать или появляться, она только переходит из одной формы в другую и перераспределяется между различными областями пространства, стремясь к некоторому среднему уровню. Одним из результатов такого перераспределения энергии и является движение материи.
Раздел физики, изучающий движение тел, называется механикой. Механика, в свою очередь, разделяется на три подраздела – кинематика, динамика и статика. Кинематика изучает само движение тел, динамика изучает причины этого движения, статика изучает причины отсутствия движения (равновесия).
Рис. 1. Механика кинематика динамика статика.
Основные законы кинематики
В школьном курсе кинематики изучается равноускоренное движение и его частный случай – равномерное движение.
Рис. 3. Равноускоренное и равномерное движение.
Поскольку движение заключается в изменении положения тела относительно Системы Отсчета, то основные законы кинематики описывают перемещение и скорость тела в произвольный момент времени $t$:
$$\overrightarrow x=\overrightarrow x_0+\overrightarrow v_0t+{\overrightarrow at^2\over 2}$$
$$\overrightarrow v=\overrightarrow v_0 + \overrightarrow at$$
где:
- $x$ – перемещение тела в момент времени $t$;
- $v$ – скорость тела тела в момент времени $t$;
- $x_0$ – перемещение тела в начальный момент;
- $v_0$ – скорость тела в начальный момент;
- $a$ – ускорение, с которым тело движется на всем промежутке времени;
Подчеркнем векторный характер кинематических уравнений движения материальной точки. Все величины, входящие в них (кроме времени), имеют направление, которое может быть различным. Поэтому применять эти формулы необходимо с соблюдением законов сложения векторов, проецируя их на оси координат, и лишь затем выполняя действия непосредственно.
Нередко оказывается полезным после проецирования векторов выразить время из одной формулы, и подставить его в другую, получив выражение, связывающее текущую, начальную скорости, перемещение и ускорение:
$$v=\sqrt{v_0^2 + 2ax}$$
Применение такой формулы для проекций зачастую заметно упрощает решение задач.
Что мы узнали?
Кинематика – это один из разделов механики. Кинематика материальной точки описывает движение тела, без изучения причин этого движения.
-
/5
Вопрос 1 из 5
Криволинейное движение
При криволинейном движении у вектора скорости изменяется направление. При этом может меняться и его модуль, т. е. длина. В этом случае вектор ускорения раскладывается на две составляющие: касательную к траектории и перпендикулярную к траектории (рис. 10). Составляющая называется тангенциальным (касательным) ускорением, составляющая –нормальным(центростремительным) ускорением.
Рис. 10.
- Ускорение при криволинейном движении
- Тангенциальное ускорение характеризует быстроту изменения линейной скорости, а нормальное ускорение характеризует быстроту изменения направления движения.
- Полное ускорение равно векторной сумме тангенциального и нормального ускорений:
Модуль полного ускорения равен:
Рассмотрим равномерное движение точки по окружности. При этом и . Пусть в рассматриваемый момент времени t точка находится в положении 1 (рис. 11). Спустя время Δt точка окажется в положении 2, пройдя путь Δs, равный дуге 1—2. При этом скорость точки v получает приращение Δv, в результате чего вектор скорости, оставаясь неизменным по величине, повернется на угол Δφ, совпадающий по величине с центральным углом, опирающимся на дугу длиной Δs:
где R—радиус окружности, по которой движется точка. Найдем приращение вектора скорости Для этого перенесем вектор так, чтобы его начало совпадало с началом вектора . Тогда вектор изобразится отрезком, проведенным из конца вектора в конец вектора . Этот отрезок служит основанием равнобедренного треугольника со сторонами и и углом Δφ при вершине. Если угол Δφ невелик (что выполняется для малых Δt), для сторон этого треугольника можно приближенно написать:
Разделив обе части уравнения на Δt и сделав предельный переход, получим величину центростремительного ускорения:
Здесь величины v и R постоянные, поэтому их можно вынести за знак предела. Предел отношения – это модуль скорости Его также называют линейной скоростью.
Рис. 11.
Радиус кривизны
Радиус окружности R называется радиусом кривизны траектории. Величина, обратная R, называется кривизной траектории:
где R — радиус рассматриваемой окружности. Если α есть центральный угол, соответствующий дуге окружности s, то, как известно, между R, α и s имеет место соотношение:
s = Rα. (18)
Понятие радиуса кривизны применимо не только к окружности, но и любой кривой линии. Радиус кривизны (или обратная ему величина – кривизна) характеризует степень изогнутости линии. Чем меньше радиус кривизны (соответственно, чем больше кривизна), тем сильнее изогнута линия. Рассмотрим это понятие подробнее.

12 кривая проведена сплошной линией, а круг кривизны — пунктирной).
Радиус круга кривизны дает радиус кривизны рассматриваемой кривой в точке A, а центр этого круга — центр кривизны кривой для той же точки А.
Проведем в точках B1 и В2 касательные B1D и В2Е к окружности, проходящей через точки В1, А и B2. Нормали к этим касательным B1С и В2С представят собой радиусы R окружности и пересекутся в ее центре С. Введем угол Δα между нормалями В1С и В2С; очевидно, он равен углу между касательными В1D и В2E. Обозначим участок кривой между точками B1 и В2 как Δs. Тогда по формуле (18):
Рис. 12.
Круг кривизны плоской кривой линии
Рис. 13.
Определение кривизны плоской кривой в разных точках
На рис. 13 изображены круги кривизны плоской линии в разных точках. В точке A1, где кривая является более пологой, радиус кривизны больше, чем в точке A2, соответственно, кривизна линии в точке A1 будет меньше, чем в точке A2.
В точке A3 кривая является еще более пологой, чем в точках A1 и A2, поэтому радиус кривизны в этой точке будет больше, а кривизна меньше. Кроме того, круг кривизны в точке A3 лежит по другую сторону кривой.
Поэтому величине кривизны в этой точке приписывают знак, противоположный знаку кривизны в точках A1 и A2: если кривизну в точках A1 и A2 будем считать положительной, то кривизна в точке A3 будет отрицательной.
Не нашли то, что искали? Воспользуйтесь поиском: