

Основные операции
Рисунки некоторых векторов и их координат уже были представлены. Эта информация поможет лучше понять, как изобразить «направленный отрезок» на заданной плоскости или в пространстве. Далее предстоит познакомиться с наиболее распространенными операциями над векторами.
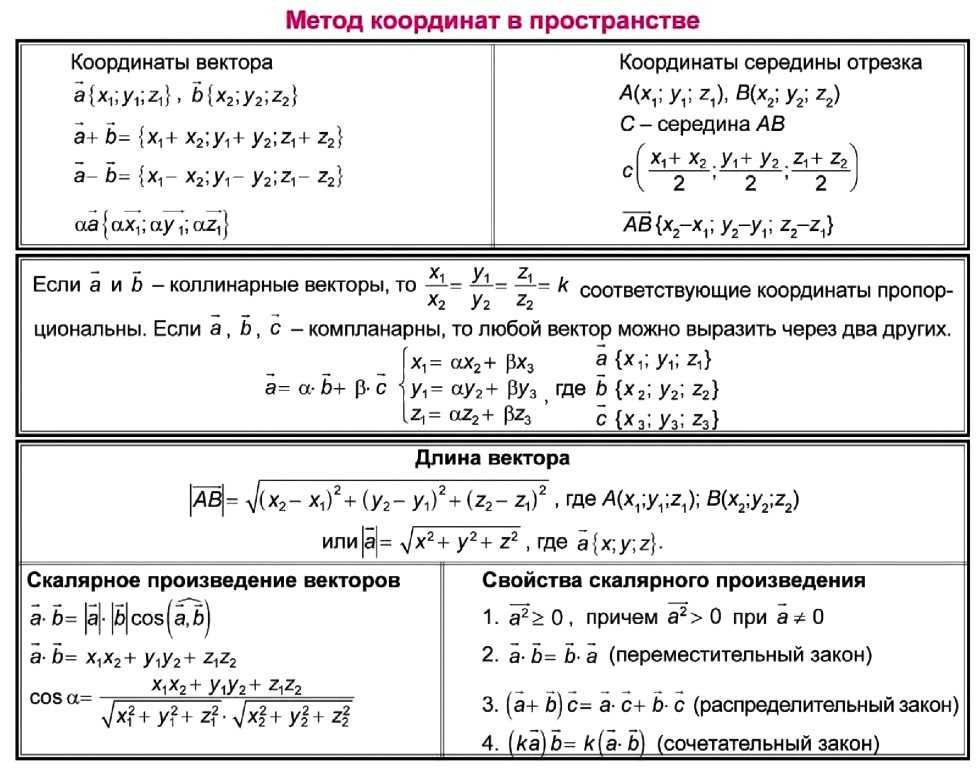
Обнаружение координат
Пусть будет дан вектор AB. Чтобы найти его координаты, необходимо из координат конечной точки (B) вычесть соответствующие координаты начальной точки (A). Полученные значения – это и есть интересующий параметр.
Выше можно увидеть формулы, которые помогут определить координаты вектора в том или ином случае.
Сложение
Для сложения двух векторов a и b необходимо из произвольной точки отложить вектор AB, который будет равен a, а из нее – BC, равный b. Соединив точку, из которой выходит C и BC, получится новый отрезок – AC. Это сумма первоначально заданных значений. Данный принцип – это так называемое правило треугольника.
Для коллинеарных векторов актуальны следующие принципы:
Сложение нескольких векторов
Ранее предложенное правило распространяется на любое количество «направленных отрезков»: два, три, четыре и более. Чтобы получить итоговую сумму нескольких векторов, каждый последующий соответствующий элемент требуется прибавлять к ранее вычисленному результату.
В качестве примера можно взять одну простейшую задачу: пусть будут даны векторы a, b, c. Из произвольной точки A на заданной плоскости сначала необходимо отложить отрезок, который будет равен a. От его конца – отложить b и так далее. Пользуясь соответствующим алгоритмом, можно изобразить необходимые векторы. Конечная точка последнего отложенного «направленного отрезка» – это отрезок AB. Он отражает векторную сумму. Соответствующее правило называется правилом многоугольника:
Для вычитания отсутствуют специальные отдельные алгоритмы. Разность векторов a и b – это вектор, сумма которого с вектором b равняется a. Для нее справедливо равенство: a — b = a + (-b).
Умножение
Следующая операция над векторными величинами – это умножение. Чтобы умножить вектор на некоторое число k, нужно запомнить такие правила и принципы выполнения математических действий:
- когда модуль k > 1 – вектор растягивается в k-раз;
- если модуль 1 > k > 0 – вектор сожмется в 1/k-раз;
- когда k = 1 – «направленный отрезок» остается неизменным;
- если k < 0 – меняется направление отрезка, а также применяются ранее указанные правила умножения;
- если один из имеющихся множителей нулевой или это число, равное 0, результатом умножения выступит нулевой вектор.
Вот наглядный пример графического изображения произведения векторных величин:
В заданном примере предусматривается a и некоторое число k = 2, а также b и число k = -1/3.
Свойства над векторами
Формулы, помогающие найти координаты вектора, уже известны. Теперь необходимо запомнить несколько свойств, характерных для «направленных отрезков». Некоторые из них являются очевидными, а какие-то требуют обоснования с геометрической точки зрения:
- Если к тому или иному вектору прибавляется нулевой, никаких изменений не осуществляется.
- Если даны два вектора, которые требуется сложить, их допустимо отложить от одной и той же точки. Получившаяся фигура после этого должна быть дорисована до параллелограмма. Сумма заданных ранее векторов – это диагональ параллелограмма.
- Правило ассоциативности: (a + b) + c = a + (b + c). Соответствующий принцип может называться еще и сочетательным законом. Он позволяет решать разнообразные задачи, связанные со сложением векторов.
- Использование нейтрального элемента в процессе нахождения произведения: a = a * 1.
- У любого вектора a существует противоположный –a. Для них характерно свойство a + (-a) = нулевой вектор.
Теперь ясно, как определить начало заданного вектора, векторную сумму или произведение, а также их разность. Рассмотренный математический элемент применяется в самых разных сферах жизни.
Что такое метод координат в алгебре и геометрии
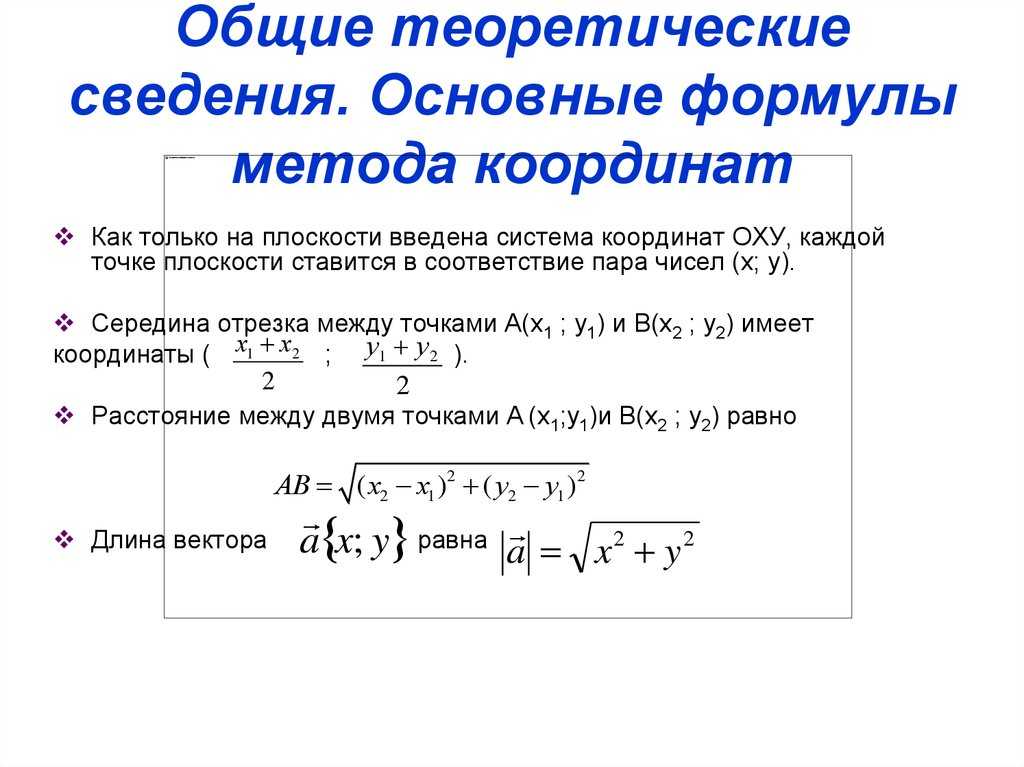
Часто при решении задач в алгебре и геометрии используют метод координат.
Сущность метода заключается в том, что наиболее удобным способом задается система координат, затем находят координаты точек и определяют искомые величины с помощью уравнений.
Например, начало системы координат располагают в какой-либо вершине фигуры, а координатные оси направляют вдоль ребер.
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут
![]()
Приведем общий алгоритм решения задач с использованием метода координат:
- Задают систему координат (пространственную или на плоскости).
- Находят и записывают координаты опорных точек, например, координаты начала и конца отрезка, координаты точек на плоскости.
- Составляют необходимые уравнения: плоскости, прямой.
- Решают задачу с использованием формул.
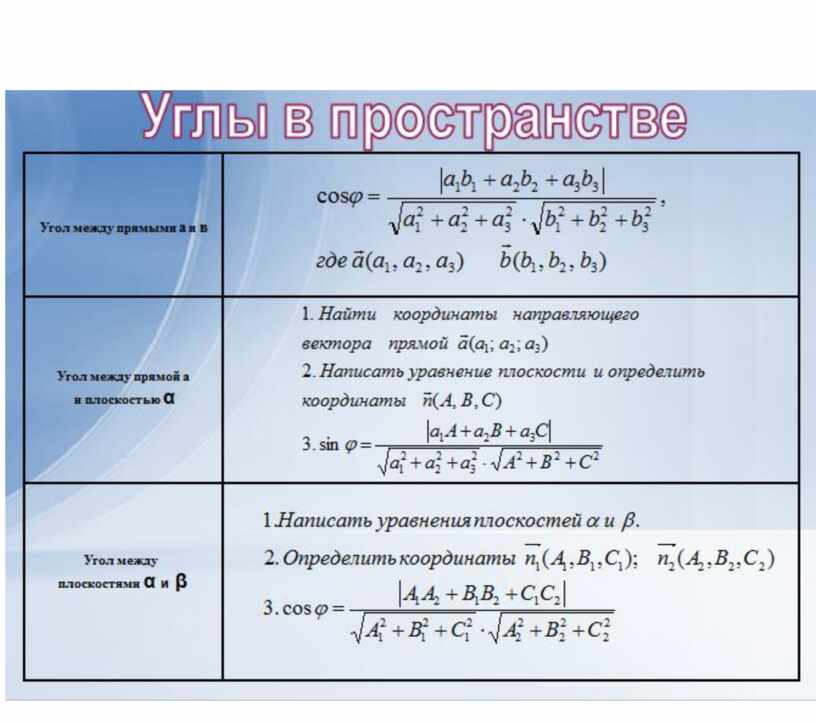
Метод координат применяется для определения:
- расстояний между прямыми, плоскостями, прямой и плоскостью;
- углов между прямой и плоскостью, прямыми и плоскостями.
Основное преимущество рассматриваемого метода состоит в том, что для решения задач нет необходимости делать дополнительные построения. Достаточно задать и указать на чертеже оси координат.
Упражнение со скоростью: скользим по радуге
Хотя сила гравитации подробно описывается в главе 6, но здесь мы рассмотрим результат действия этой силы на небольшом примере с векторами в двух измерениях. Представьте себе, что мячик для игры в гольф движется по горизонтальной вершине скалы со скоростью 1,0 м/с и вскоре сорвется с края скалы на высоте 5 метров от поверхности Земли, как показано на рис. 4.11. Насколько далеко улетит мячик и с какой скоростью он столкнется с поверхностью Земли? В этой задаче прежде всего нужно определить время движения мячика.
![]()
Приступим к сбору фактов. Нам известно, что компоненты скорости мячика равны (1; 0), и он находится на высоте 5 метров от поверхности Земли. В процессе падения под действием силы тяготения Земли он движется с постоянным ускорением, \( g \), величина которого равна около 9,8 м/с2.
Итак, как определить, насколько далеко он упадет от края скалы? Один из способов решения этой задачи основан на определении времени движения мячика до столкновения с поверхностью Земли. Поскольку мячик ускоряется только в направлении оси Y (т.е. вертикально вниз), а его компонента скорости по оси X, \( v_x \), не меняется, то пройденное по горизонтали расстояние до столкновения будет равно \( v_xt \), где \( t \) — время движения мячика до столкновения. Сила тяготения ускоряет мячик по вертикали, а значит, перемещение по вертикали (т.е. вдоль оси Y) равно:
В данном случае перемещение по вертикали \( s_y \) = 5 метров, а ускорение \( a_y \) = \( g \) = 9,8 м/с2. Поэтому предыдущее уравнение принимает вид:
Это значит, что время движения мячика до столкновения равно:
Итак, мы вычислили, что мячик будет находиться в полете 1,0 секунды. Отлично, явный прогресс! Поскольку компонента скорости мячика по оси X не изменялась в течение этого времени, то можно легко вычислить расстояние, которое пролетит мячик по горизонтали (т.е. вдоль оси X) за это время:
Подставляем числа и получаем:
Итак, мячик столкнется с поверхностью Земли на расстоянии 1,0 метра по горизонтали.
Теперь можно приступать ко второму вопросу задачи: попробуем определить скорость мячика в момент столкновения с поверхностью Земли. Частично ответ на этот вопрос мы уже знаем, поскольку компонента скорости мячика по оси X не изменялась. Однако по вертикали сила тяготения ускорила мячик по вертикали (т.е. вдоль оси Y), а потому компоненты конечной скорости имеют следующий вид: (1,0; ?). Итак, нам нужно определить величину компоненты скорости мячика по оси Y, обозначенной вопросительным знаком. Воспользуемся следующим соотношением для компоненты скорости по вертикали:
В данном случае начальная скорость \( v_{y0} \) = 0, постоянное ускорение \( a_y=g \) и нужно определить только конечную скорость \( v_{y1} \). Поэтому предыдущее уравнение приобретает следующий вид:
Подставляем числа и получаем:
Отрицательный знак здесь обозначает направление вниз вектора \( \mathbf{g} \), т.е. в отрицательном направлении оси Y. Итак, подставляем обновленное значение ускорения и получаем:
Итак, компоненты конечной скорости мячика равны (1,0; -9,8) м/с. Чтобы найти величину вектора скорости (а не его отдельных компонент) в момент столкновения с поверхностью Земли, выполним следующие вычисления:
Триумфальный финал! Мячик пролетит 1,0 метра по горизонтали и столкнется с поверхностью Земли со скоростью 9,9 м/с. Совсем неплохо для начала.
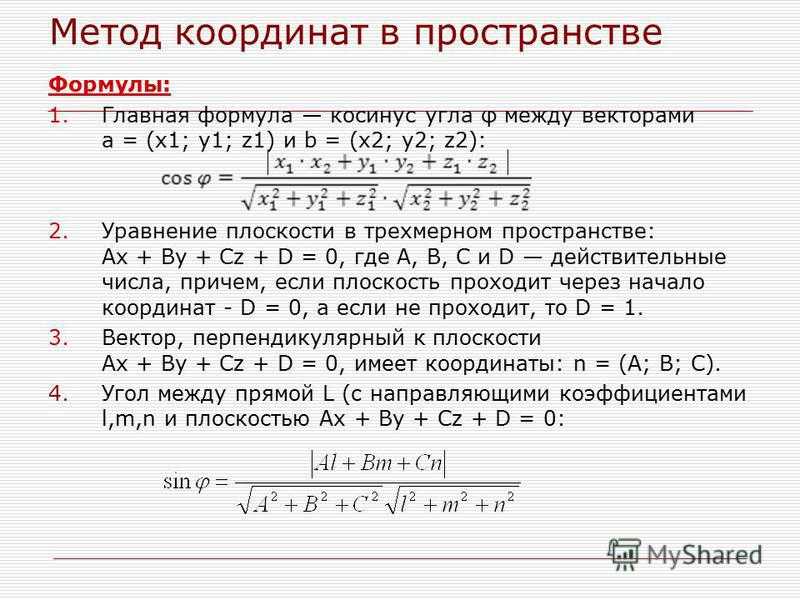
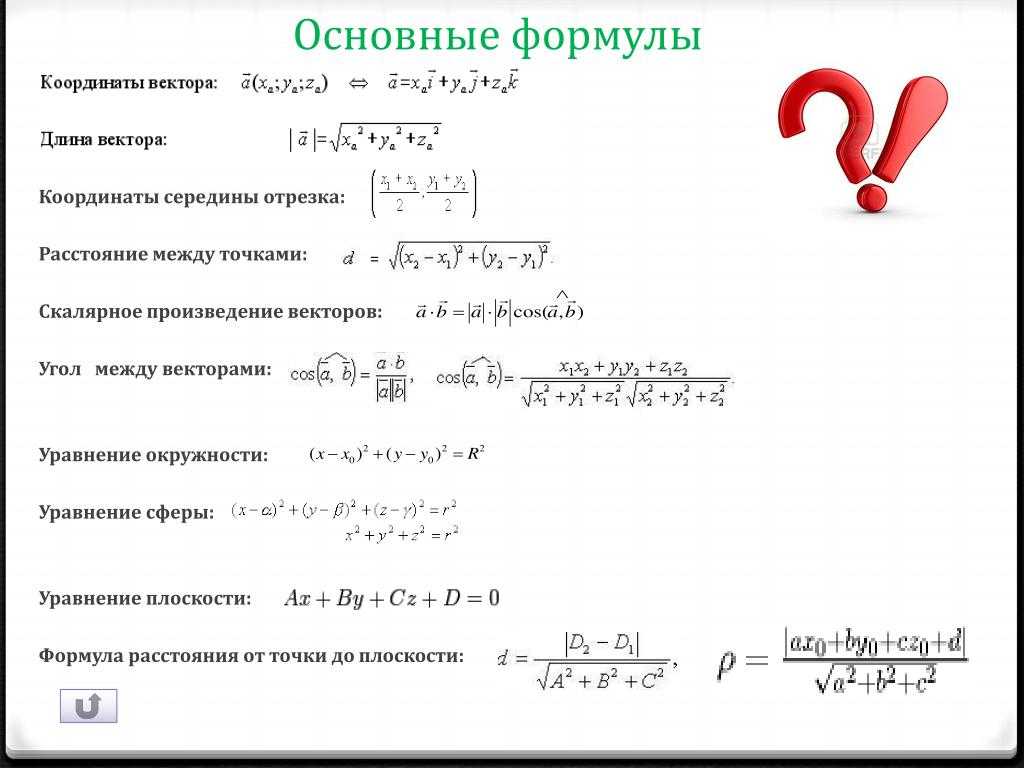
Метод координат
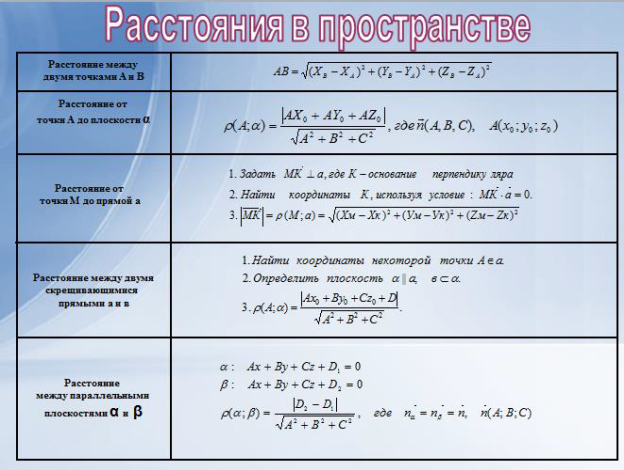
- Расстояние между точками А(xa; ya; za) и B(xb; yb; zb) выражается формулой, показанной в предыдущей главе:
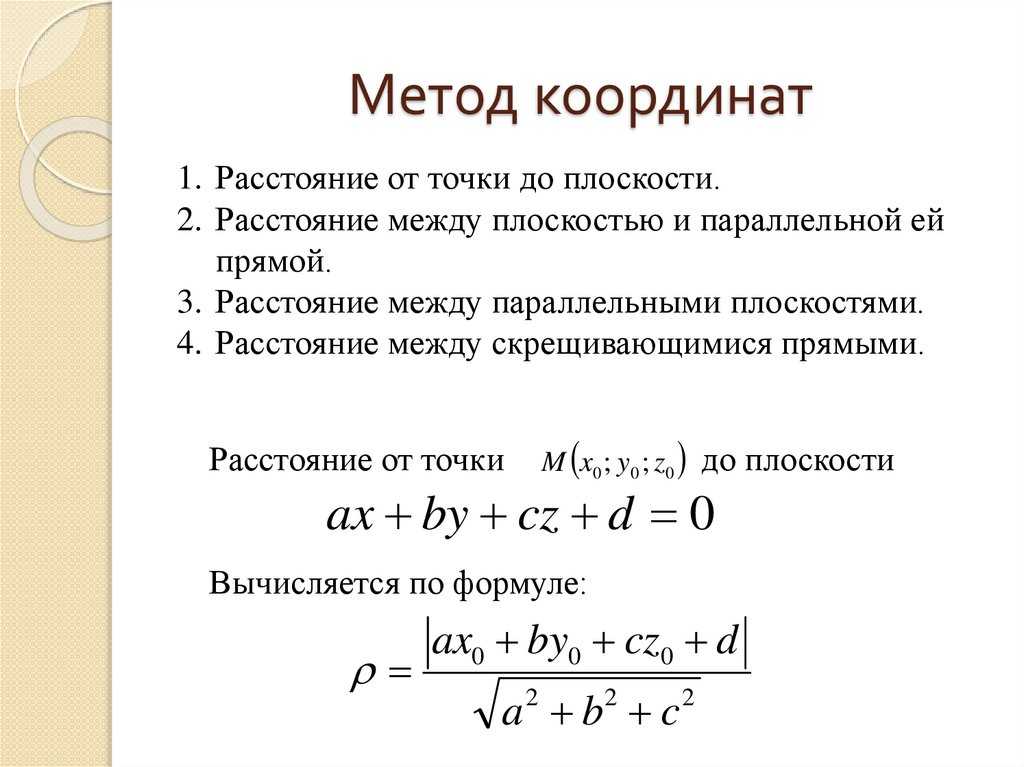
- Расстояние от точки M(xm; ym;zm) до плоскости α, заданной общим уравнением Ax + By + Cz + D = 0, может быть вычислено по формуле:
- Расстояние между параллельными плоскостямии α1 и α2 (α1: Ax + By + Cz + D1 =0 и α2: Ax + By + Cz + D2 = 0) вычисляется по формуле:
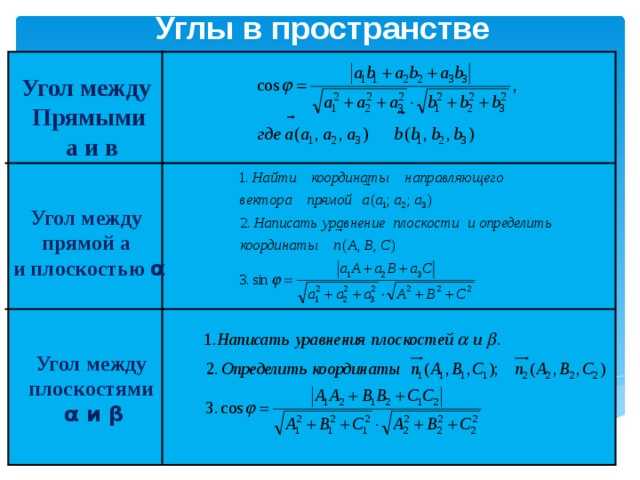
- Угол между скрещивающимися прямыми. Косинус угла между ними (острого) определяется по декартовым координатам векторов этих прямых:Тогда формула приобретает следующий вид:
- Угол между плоскостями α и β, заданными уравнениями можно найти с помощью следующей формулы:
Линейные операции над геометрическими векторами
Умножение вектора на число
Произведением вектора на число
называется вектор, получающийся из вектора растяжением
(при ) или сжатием (при )
в раз, причём направление вектора
сохраняется, если ,
и меняется на противоположное, если . (Рис. 2)
Из определения следует, что векторы и =
всегда расположены на одной или на параллельных прямых. Такие векторы называются коллинеарными. (Можно говорить также, что эти векторы параллельны, однако в векторной алгебре принято говорить «коллинеарны».) Справедливо и обратное утверждение:
если векторы и коллинеарны,
то они связаны отношением
. (1)
Следовательно, равенство (1) выражает условие коллинеарности двух векторов.
Сложение и вычитание векторов
При сложении векторов нужно знать, что суммой векторов и
называется вектор , начало которого
совпадает с началом вектора , а конец — с концом вектора ,
при условии, что начало вектора приложено к концу вектора . (Рис. 3)
Это определение может быть распределено на любое конечное число векторов. Пусть в пространстве даны n
свободных векторов . При сложении
нескольких векторов за их сумму принимают замыкающий вектор, начало которого
совпадает с началом первого вектора, а конец — с концом последнего вектора. То есть, если к концу вектора
приложить начало вектора , а к концу вектора
— начало вектора и т.д. и, наконец, к концу вектора
— начало вектора , то
суммой этих векторов служит замыкающий вектор , начало которого совпадает с началом первого вектора
, а конец — с концом последнего вектора . (Рис. 4)
Слагаемые называются составляющими вектора , а
сформулированное правило — правилом многоугольника. Этот многоугольник может и не быть плоским.
При умножении вектора на число -1 получается противоположный вектор
.
Векторы и имеют одинаковые длины и противоположные направления.
Их сумма даёт нулевой вектор,
длина которого равна нулю. Направление нулевого вектора не определено.


В векторной алгебре нет необходимости рассматривать отдельно операцию вычитания: вычесть из вектора
вектор
означает прибавить к вектору противоположный вектор
, т.е.
Пример 1. Упростить выражение:
.
Решение:
,
то есть, векторы можно складывать и умножать на числа так же, как и многочлены (в частности,
также задачи на упрощение выражений). Обычно необходимость упрощать линейно подобные выражения с векторами возникает перед
вычислением произведений векторов.
Пример 2. Векторы и
служат диагоналями параллелограмма ABCD (рис. 4а).
Выразить через и
векторы , ,
и ,
являющиеся сторонами этого параллелограмма.
Решение. Точка пересечения диагоналей параллелограмма делит каждую диагональ пополам.
Длины требуемых в условии задачи векторов находим либо как половины сумм векторов, образующих с искомыми треугольник, либо как половины разностей (в зависимости
от направления вектора, служащего диагональю), либо, как в последнем случае, половины суммы, взятой со знаком минус. Результат —
требуемые в условии задачи векторы:
Есть все основания полагать, что теперь Вы правильно ответили на вопрос о векторах «Предприимчивость»
и «Инновационные способности» в начале этого урока. Правильный ответ: над этими векторами производится
операция сложения.
Решить задачи на векторы самостоятельно, а затем посмотреть решения
Пример 3. Даны векторы
и
. Построить на
чертеже векторы 1) ,
2) ,
3) ,
4) .
Пример 4. Даны векторы
и
. Построить на
чертеже векторы 1) ,
2) ,
3) ,
4) .
Как найти длину суммы векторов?
Эта задача занимает особое место в операциях с векторами, так как
предполагает использование тригонометрических свойств. Допустим, Вам попалась задача
вроде следующей:
Даны длины векторов
и длина суммы этих векторов .
Найти длину разности этих векторов .
Решения этой и других подобных задач и объяснения, как их решать — в
уроке «Сложение векторов: длина суммы векторов и теорема косинусов».
А проверить решение таких задач можно на Калькуляторе
онлайн «Неизвестная сторона треугольника (сложение векторов и теорема косинусов)».
А где произведения векторов?
Произведения вектора на вектор не являются линейными операциями и рассматриваются отдельно. И у нас есть уроки «Скалярное произведение векторов» и «Векторное и смешанное произведения векторов».
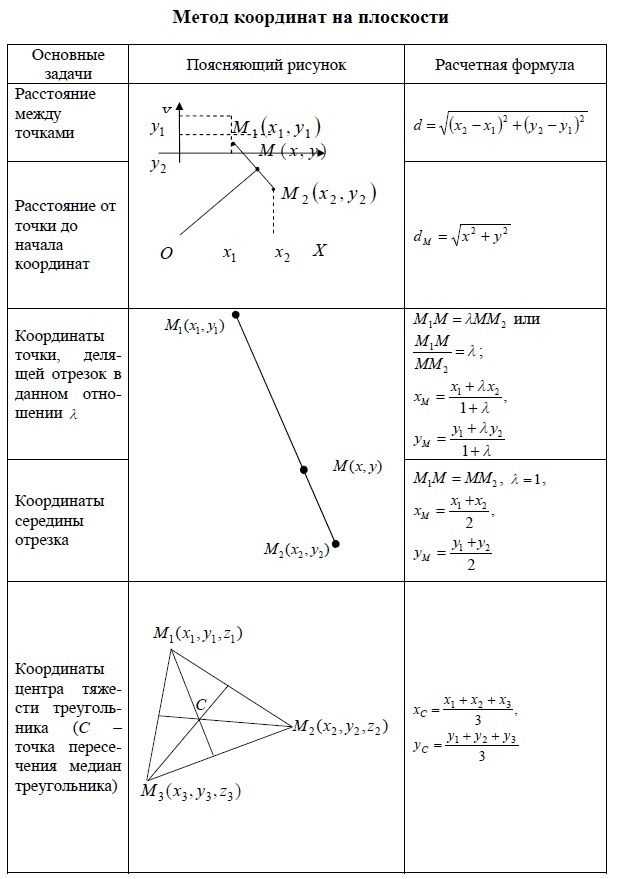
Расположение на плоскости
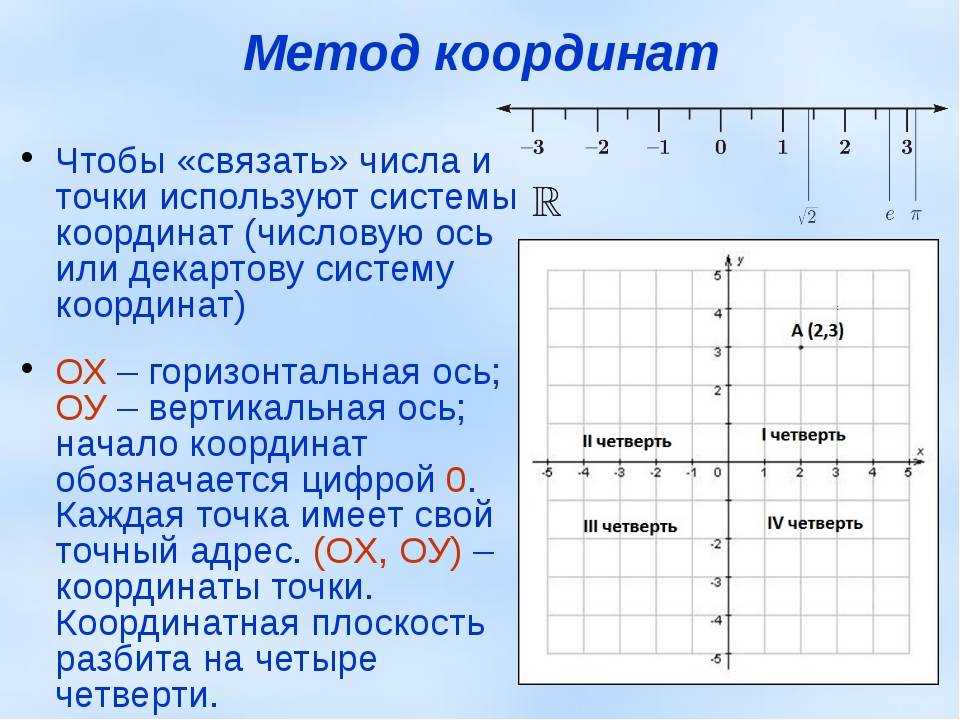
Пусть существуют две плоскости, образующие между собой прямой угол. Их точка пересечения A является началом отсчёта любой из них. Если ось одной плоскости обозначить за X, а второй — за Y, то общим для них пространством будет Axy. Ось, совпадающая с X, называется абсциссой, а Y — ординатой. Единица длины для них одинакова. Пересекающиеся оси образуют четверти. Нумерацию принято вести с верхней правой части против часовой стрелки.
![]()
Пусть в плоскости Axy находится произвольная точка. Проведя с неё перпендикуляры на оси, получим два пересечения. Числовые значения в этих местах и будут определять положение A на плоскости, то есть её координаты. Записывают их как A (x, y) и называют декартовыми. Таким образом, нахождение A сводится к определению двух точек, лежащих на осях x и y.
Когда точка располагается на оси X, то её ордината имеет нулевое значение, а если Y — абсцисса. В зависимости от того, в какой четверти находится исследуемый объект, определяется знак его координат. В первой оба числа положительные, а в третьей — отрицательные. Во второй же абсцисса имеет положительное значение, а ордината — отрицательное. В третьей же знаки координат обратные второй четверти.
Естественно, что каждой точке на плоскости соответствует пара чисел. Любая фигура состоит из множества точек. Проведя учёт точек и зная их взаимоотношение относительно друг друга, можно изучить свойство объекта. Эти вычисления позволяет выполнить алгебра и арифметика. Поэтому появляется возможность решать геометрические задачи наглядными алгебраическими способами.
В этом и лежит основа использования метода координат в пространстве. Формулы, применяемые при расчётах, хотя и выглядят устрашающе, на самом деле запоминаются легко. Правда, для этого следует выполнить несколько практических заданий.
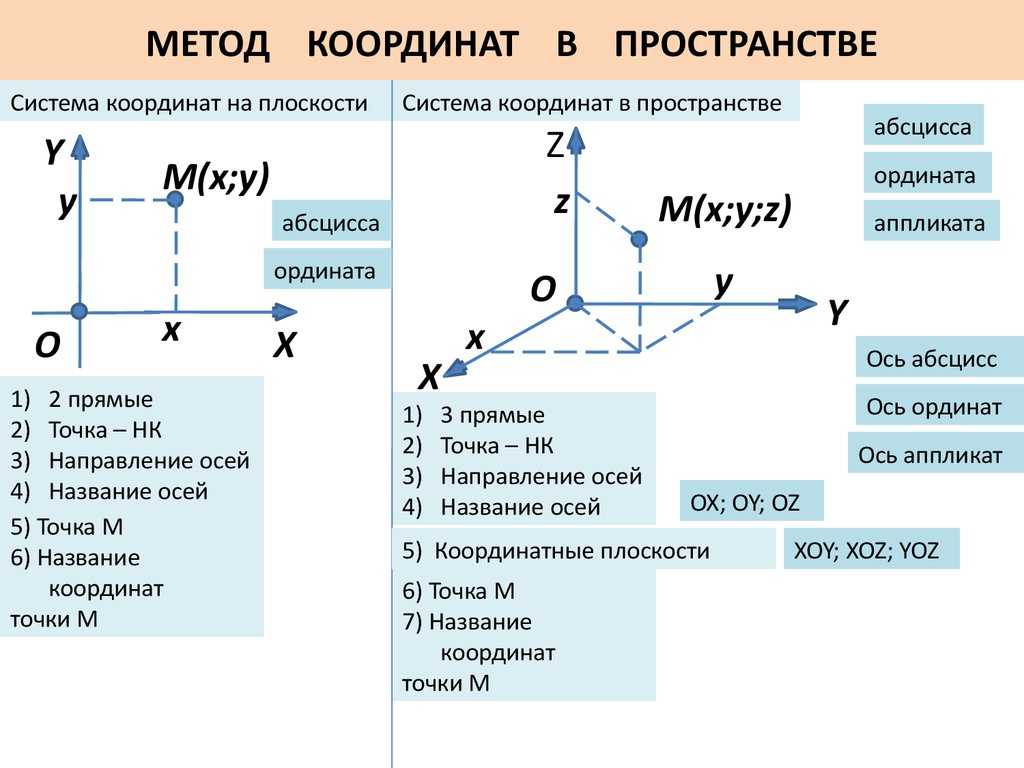
Векторы и их координаты
![]() Вектор – это математический объект, характеризующийся величиной и направлением. Например, в геометрии и в естественных науках вектор есть направленный отрезок прямой.
Вектор – это математический объект, характеризующийся величиной и направлением. Например, в геометрии и в естественных науках вектор есть направленный отрезок прямой.
Мы можем «привязать» вектор к системе координат, т.е. мы можем его определять в пространстве координатами его проекций на координатные плоскости.
Если даны две точки в пространстве А(xa; ya; za) и B(xb; yb; zb), то дан и вектор
, где ах, ау и аz – координаты вектора. Осталось определить значения ах, ау и аz. ![]() Определяем:
Определяем:
ах = xb– xa
ау = yb– ya
аz = zb – zа
Теперь, зная длины проекций вектора, мы можем легко найти длину вектора, которая, как видно из чертежа, есть не что иное, как диагональ параллелепипеда, сторонами которого являются координаты этого вектора. Его длина, модуль вектора, будет равна:
![]()
А что есть длина вектора, как не расстояние между двумя точками: началом и концом вектора? То есть выведенная формула определяет расстояние между двумя точками в декартовой системе координат.
Сущность координатного метода для решения геометрических задач
Координатный метод решения задач основан на решении задач с помощью введения в задачу системы координат. В этой статье мы не будем делать акцент на том, как именно вводятся координаты, предполагая, что с этим понятием мы уже знакомы.
Метод координат для решения геометрических задач основан на следующих основных утверждениях.
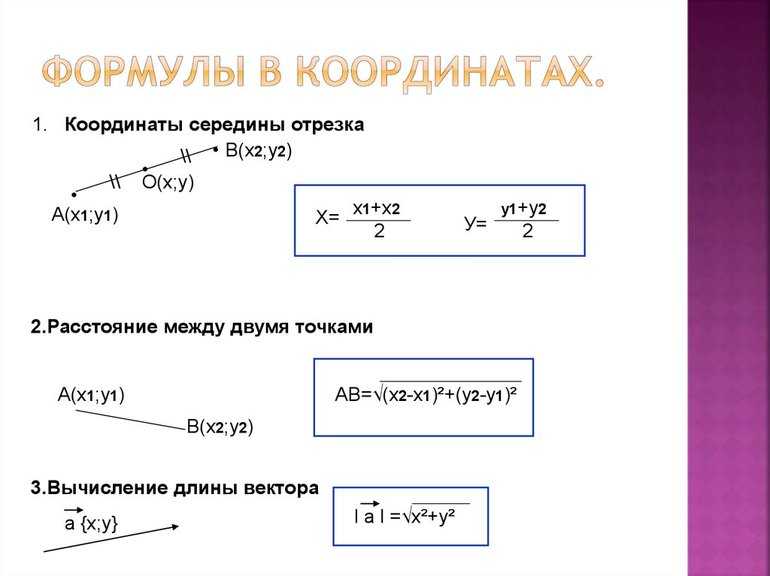
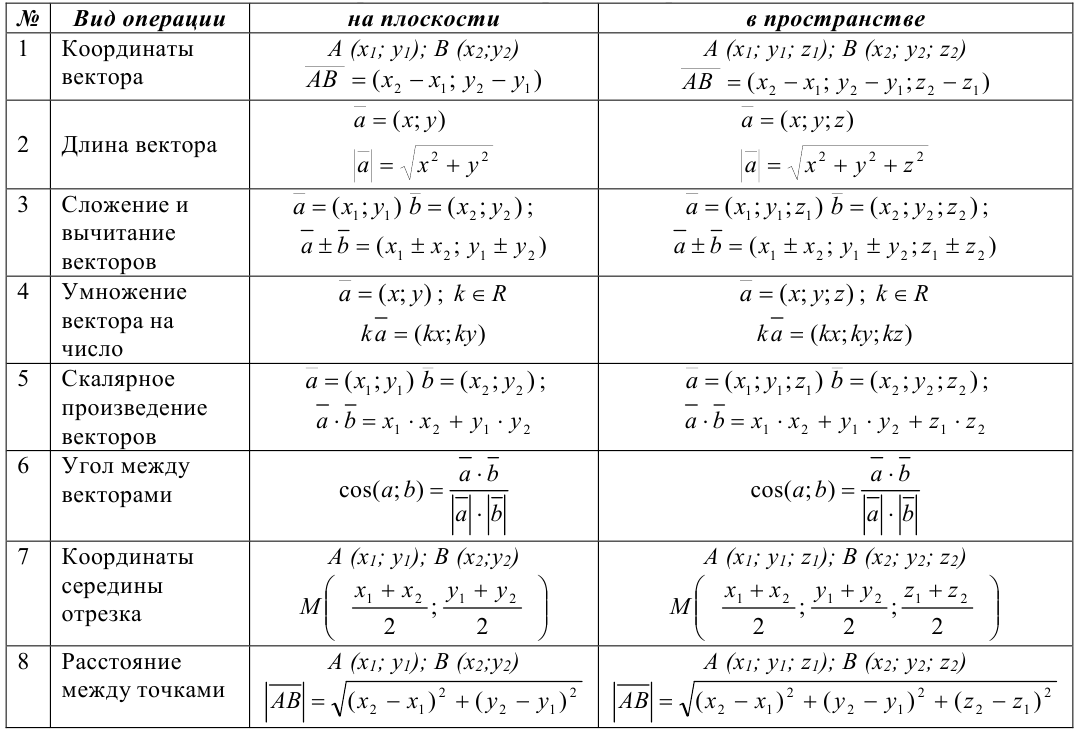
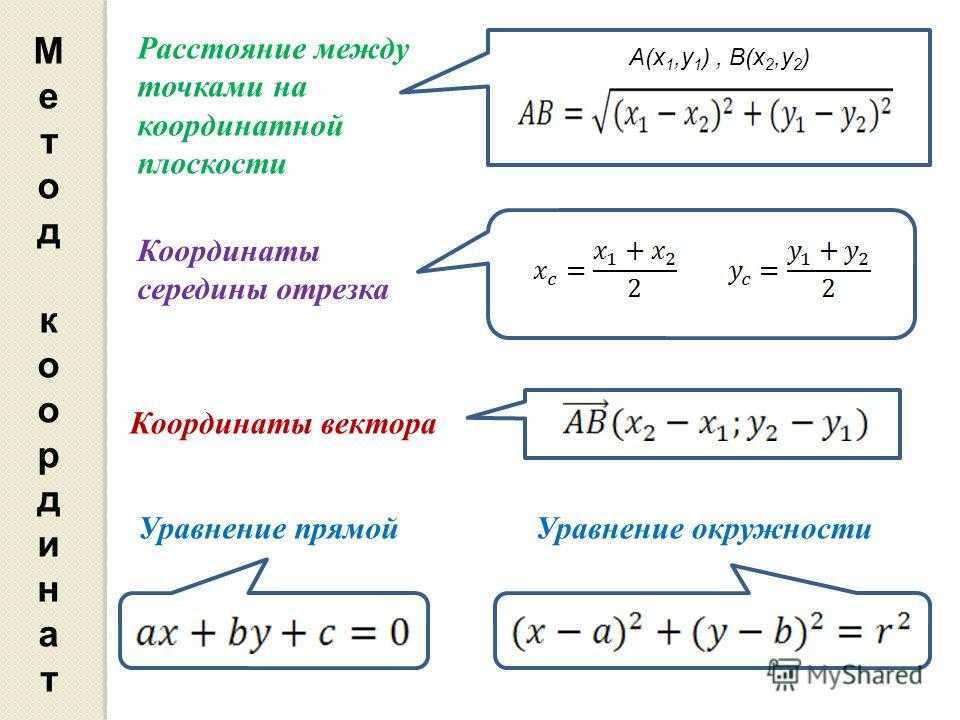
Утверждение 1: Координаты вектора равны разности соответствующих координат конца вектора и его начала.
Утверждение 2: Координата середины отрезка равна полусумме соответствующих координат его концов.
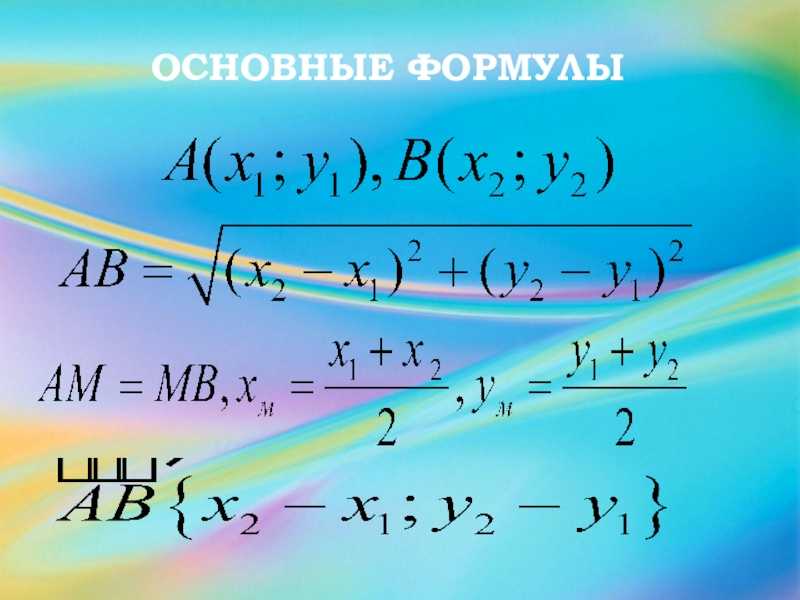
Утверждение 3: Длина вектора с координатами $\left\{x,\ y\right\}$ равняется
Утверждение 4: Расстояние между двумя точками с координатами $\left\{x_1,\ y_1\right\}$ и $\{x_2,\ y_2\}$ равняется
Нахождение угла
Например, необходимо найти угол между плоскостями. Координатным методом решить поставленную задачу несложно. С точки зрения геометрии, это угол между двумя параллелями. Отметив на поверхности начало координат, через него можно провести перпендикуляры обеим плоскостям. Образованный угол и будет искомым. Поэтому для решения задачи необходимо:
- записать уравнения плоскостей;
- составить векторы нормали;
- вычислить значение косинуса угла между поверхностями.
![]()
Для составления уравнений следует найти положение трёх точек, лежащих в плоскости, но не на одной нормали. Затем каждое из них подставить в уравнение и получить систему. Решается последняя любым доступным методом, например, нахождением определителя матрицы или графическим смешанным методом. В итоге находят корни системы A, B, C и составляют вектор нормали. При этом полученные координаты не должны быть коллинеарными, то есть не лежать на одной прямой или быть параллельными.
Пусть имеется единичный куб, в котором нужно найти угол, образованный A1, B1, C1 и C1, D, A1. Вначале определяют координаты первой плоскости и подставляют их в уравнение: Ax+By+Cz+1 = 0. Тут следует отметить: свободный член добавляется из-за того, что поверхности не проходят через середину координат. Точки определяются значениями: A1 (1, 0, 1), B (0,0,1), D (1,1,0). После подстановки система уравнений примет вид:
{A + 0 +C + 1 = 0;
{0 + 0 + C + 1 = 0;
{A + B + 0 + 1 = 0.
![]()
Из второго равенства можно определить C. Подставив найденное C в первое равенство, можно выразить A, а после найти B. Таким образом, решением системы будет A = 0, B = -1, C = -1. Вектор нормали, соответственно, будет: N1 (0; -1; -1).
Чтобы составить уравнение второй плоскости, нужно найти координаты лишь С1. Исходя из условия, они будут равны С1 (0; 1; 1), а A и D уже известны. Подставляя данные в уравнение Ax+By+Cz+1 = 0, опять составляют систему и находят её коэффициенты. После решения второй матрицы, например, методом разложения, можно записать координаты второго вектора: N2 (-½; ½; -½).
Теперь, когда известны N1 и N2, нужно найти косинус между ними, являющийся углом двух искомых плоскостей. Используя формулу для вычисления угла векторов, можно получить следующее: cosα = |½ + ½| / (2½ * ¾½) = 1 / (6½/2) = 2/6½ = 6½ / 3. Соответственно, угол равен: α = arccos = 6½ / 3.
Действия с векторами. Коллинеарность векторов
В школьном курсе геометрии рассматривается ряд действий и правил с векторами: сложение по правилу треугольника, сложение по правилу параллелограмма, правило разности векторов, умножения вектора на число, скалярное произведение векторов и др.
Для затравки повторим два правила, которые особенно актуальны для решения задач аналитической геометрии.
Правило сложения векторов по правилу треугольников
Рассмотрим два произвольных ненулевых вектора и :
Требуется найти сумму данных векторов. В силу того, что все векторы считаются свободными, отложим вектор от конца
вектора :
Суммой векторов и является вектор . Для лучшего понимания правила в него целесообразно вложить физический смысл: пусть некоторое тело совершило путь по вектору , а затем по вектору . Тогда сумма векторов представляет собой вектор результирующего пути с началом в точке отправления и концом в точке прибытия. Аналогичное правило формулируется для суммы любого количества векторов. Как говорится, тело может пройти свой путь сильно поддатым по зигзагу, а может и на автопилоте – по результирующему вектору суммы.
Кстати, если вектор отложить от начала
вектора , то получится эквивалентное правило параллелограмма
сложения векторов.
Сначала о коллинеарности векторов. Два вектора называются коллинеарными
, если они лежат на одной прямой или на параллельных прямых. Грубо говоря, речь идёт о параллельных векторах. Но применительно к ним всегда используют прилагательное «коллинеарные».
Представьте два коллинеарных вектора. Если стрелки данных векторов направлены в одинаковом направлении, то такие векторы называются сонаправленными
. Если стрелки смотрят в разные стороны, то векторы будут противоположно направлены
.
Обозначения:
коллинеарность векторов записывают привычным значком параллельности: , при этом возможна детализация: (векторы сонаправлены) или (векторы направлены противоположно).
Произведением
ненулевого вектора на число является такой вектор , длина которого равна , причём векторы и сонаправлены при и противоположно направлены при .
Правило умножения вектора на число легче понять с помощью рисунка:![]()
Разбираемся более детально:
1) Направление. Если множитель отрицательный, то вектор меняет направление
на противоположное.

![Math-public:vektory-slozhenie-vychitanie [президентский фмл №239]](https://biologiyavklasse.ru/wp-content/uploads/3/0/6/306e87c96b28ce6a7de44d188afac939.jpeg)



2) Длина. Если множитель заключен в пределах или , то длина вектора уменьшается
. Так, длина вектора в два раза меньше длины вектора . Если множитель по модулю больше единицы, то длина вектора увеличивается
в раз.
3) Обратите внимание, что все векторы коллинеарны
, при этом один вектор выражен через другой, например,. Обратное тоже справедливо
: если один вектор можно выразить через другой, то такие векторы обязательно коллинеарны
Таким образом: если мы умножаем вектор на число, то получится коллинеарный
(по отношению к исходному) вектор
.
4) Векторы сонаправлены. Векторы и также сонаправлены. Любой вектор первой группы противоположно направлен по отношению к любому вектору второй группы.
Какие векторы являются равными?
Два вектора равны, если они сонаправлены и имеют одинаковую длину
. Заметьте, что сонаправленность подразумевает коллинеарность векторов. Определение будет неточным (избыточным), если сказать: «Два вектора равны, если они коллинеарны, сонаправлены и имеют одинаковую длину».
С точки зрения понятия свободного вектора, равные векторы – это один и тот же вектор, о чём уже шла речь в предыдущем параграфе.
Базис.
Ранее было дано определение . Введем теперь определение базиса.
Определение.
Базисом в векторном пространстве называется упорядоченная линейно независимая система векторов такая, что любой вектор этого пространства по ней раскладывается.
Из доказанной выше сразу вытекает, что
- В нулевом пространстве базиса не существует.
- В одномерном пространстве (на прямой линии) базис состоит из одного ненулевого вектора.
- В двумерном пространстве (на плоскости) базис — упорядоченная пара неколлинеарных векторов.
- В трехмерном пространстве базис — упорядоченная тройка некомпланарных векторов.
Требование упорядоченности означает, что, например, в случае плоскости \(\boldsymbol{a}\), \(\boldsymbol{b}\) и \(\boldsymbol{b}\), \(\boldsymbol{a}\) — два разных базиса.
Так как векторы базиса линейно независимы, коэффициенты разложения по базису для каждого вектора пространства определены однозначно. Они называются компонентами или координатами вектора в этом базисе.
Таким образом, если \(\boldsymbol{e_{1}}\), \(\boldsymbol{e_{2}}\), \(\boldsymbol{e_{3}}\) — базис трехмерного пространства, то по формуле \(\boldsymbol{a} = \alpha_{1}\boldsymbol{e_{1}} + \alpha_{2}\boldsymbol{e_{2}} + \alpha_{3}\boldsymbol{e_{3}}\) каждому вектору сопоставлена единственная упорядоченная тройка чисел \(\alpha_{1}\), \(\alpha_{2}\), \(\alpha_{3}\) и каждой тройке чисел — единственный вектор. Аналогично, вектор на плоскости имеет две компоненты, а на прямой — одну.
Компоненты пишутся в скобках после буквенного обозначения вектора, например \(\boldsymbol{a}\)(1,0,1).
В аналитической геометрии геометрические рассуждения о векторах сводятся к вычислениям, в которых участвуют компоненты этих векторов. Следующее предложение показывает, как производятся линейные операции над векторами, если известны их компоненты.
Утверждение 5.
При умножении вектора на число все его компоненты умножаются на это число. При сложении векторов складываются их соответствующие компоненты.
Действительно, если \(\boldsymbol{a} = \alpha_{1}\boldsymbol{e_{1}} + \alpha_{2}\boldsymbol{e_{2}} + \alpha_{3}\boldsymbol{e_{3}}\), то
$$
\lambda\boldsymbol{a} = \lambda(\alpha_{1}\boldsymbol{e_{1}} + \alpha_{2}\boldsymbol{e_{2}} + \alpha_{3}\boldsymbol{e_{3}}) = (\lambda\alpha_{1})\boldsymbol{e_{1}} + (\lambda\alpha_{2})\boldsymbol{e_{2}} + (\lambda\alpha_{3})\boldsymbol{e_{3}}.\nonumber
$$
Если \(\boldsymbol{a} = \alpha_{1}\boldsymbol{e_{1}} + \alpha_{2}\boldsymbol{e_{2}} + \alpha_{3}\boldsymbol{e_{3}}\) и \(\boldsymbol{b} = \beta_{1}\boldsymbol{e_{1}} + \beta_{2}\boldsymbol{e_{2}} + \beta_{3}\boldsymbol{e_{3}}\), то
$$
\boldsymbol{a} + \boldsymbol{b} = (\alpha_{1}\boldsymbol{e_{1}} + \alpha_{2}\boldsymbol{e_{2}} + \alpha_{3}\boldsymbol{e_{3}}) + (\beta_{1}\boldsymbol{e_{1}} + \beta_{2}\boldsymbol{e_{2}} + \beta_{3}\boldsymbol{e_{3}}) =\\= (\alpha_{1} + \beta_{1})\boldsymbol{e_{1}} + (\alpha_{2} + \beta_{2})\boldsymbol{e_{2}} + (\alpha_{3} + \beta_{3})\boldsymbol{e_{3}}.\nonumber
$$
Для одномерного и двумерного пространств доказательство отличается только числом слагаемых.
Откладывание вектора от данной точки
Перед тем как ввести понятие суммы, разности векторов и умножения вектора на число, вначале разберем такое понятие, как откладывание вектора от точки.
Определение 1
Если точка $A$ начала какого-либо вектора $\overrightarrow{a}$, то говорят, что вектор $\overrightarrow{a}$ отложен от точки $A$ (рис. 1).
Рисунок 1.
Теорема 1
От любой точки $K$ можно отложить вектор единственный $\overrightarrow{a}$.
Доказательство.
Существование: Имеем два следующих случая:
-
Вектор $\overrightarrow{a}$ — нулевой.
Здесь получаем, что искомый нами вектор совпадает с вектором $\overrightarrow{KK}$.
-
Вектор $\overrightarrow{a}$ не является нулевым.
Пусть точка $A$ является началом вектора $\overrightarrow{a}$, а точкой $B$ — конец вектора $\overrightarrow{a}$. Проведем через точку $K$ прямую $b$ параллельную вектору $\overrightarrow{a}$. Будем откладывать на прямой отрезки $\left|KL\right|=|AB|$ и $\left|KM\right|=|AB|$. Рассмотрим векторы $\overrightarrow{KL}$ и $\overrightarrow{KM}$. Из этих двух векторов нужный нам вектор — вектор, сонаправленный с вектором $\overrightarrow{a}$ (рис.2)
Рисунок 2.
Из данного выше построения сразу же будет следовать единственность данного вектора.
Получи помощь с рефератом от ИИ-шки
ИИ ответит за 2 минуты
Сложение векторов — решение примеров
Пример 1. Векторы
и образуют угол
. Их длины:
и
. Выполнить сложение
векторов и найти их сумму
. Выполнить вычитание
векторов и найти их разность
.
Решение. Из элементарной тригонометрии известно, что .
Шаг 1. Выполняем сложение векторов. Находим длину суммы векторов, поставляя в формулу длины
косинус угла, смежного с углом между векторами:
Шаг 2. Выполняем вычитание векторов. Находим длину разности векторов, подставляя в формулу косинус «изначального» угла:
Проверить решение можно на Калькуляторе
онлайн.
Выполнить сложение и вычитание векторов самостоятельно, а затем посмотреть решение
Пример 2. Векторы
и образуют угол
. Их длины:
и
. Выполнить сложение
векторов и найти их сумму
. Выполнить вычитание
векторов и найти их разность
.
Пример 3. Даны длины векторов
и длина их суммы .
Найти длину их разности .
Решение.
Шаг 1. По теореме косинусов составляем уравнение, чтобы найти
косинус угла, смежного с углом между векторами и находим его:
Не забываем, что косинус смежного угла получился со знаком минус. Это значит, что косинус «изначального» угла
будет со знаком плюс.
Шаг 2. Выполняем вычитание векторов. Находим длину разности векторов, подставляя в формулу косинус «изначального» угла:
Проверить решение можно на Калькуляторе
онлайн.
Пример 4. Даны длины векторов
и длина их разности .
Найти длину их суммы .
Решение.
Шаг 1. По теореме косинусов составляем уравнение, чтобы найти
косинус «изначального» угла (задача обратная по отношению к примеру 1) и находим его:
Шаг 2. Меняем знак косинуса и получаем косинус смежного
угла между и
:
Шаг 3. Выполняем сложение векторов. Находим длину суммы векторов, подставляя в формулу косинус смежного угла:
Проверить решение можно на Калькуляторе
онлайн.
Пригодится: тригонометрическая таблица (синусы, косинусы, тангенсы и котангенсы распространенных углов)
Пример 5. Векторы и
взаимно
перпендикулярны, а их длины .
Найти длину их суммы и
и длину их разности .



Решение.
Два смежных угла, как нетрудно догадаться из приведённого в начале урока
определения, в сумме составляют 180 градусов. Следовательно, смежный с прямым углом (90 градусов)
угол — тоже прямой (тоже 90 градусов). Косинус такого угла равен нулю, то же самое
относится и к косинусу смежного угла. Поэтому, подставляя это значение в выражения под
корнем в формуле длины суммы и разности векторов, получаем нули как последние выражения —
произведения под знаком корня. То есть длины суммы и разности данных векторов равны,
вычисляем их:
Пример 6. Какому условию должны удовлетворять векторы
и , чтобы имели место
слелующие соотношения:
1) длина суммы векторов равна длине разности векторов, т. е. ,
2) длина суммы векторов больше длины разности векторов, т. е. ,
3) длина суммы векторов меньше длины разности векторов, т. е. ?
Решение.
Находим условие для первого соотношения. Для этого решаем следующее уравнение:
То есть, для того, чтобы длина суммы векторов была равна длине их разности,
необходимы, чтобы косинус угла между ними и косинус смежного ему угла были равны. Это условие
выполняется, когда углы образуют прямой угол.
Находим условие для второго соотношения. Решаем уравнение:
Найденное условие выполняется, когда косинус угла между векторами меньше косинуса
смежных углов. То есть, чтобы длина суммы векторов была больше длины разности векторов,
необходимо, чтобы углы образовали острый угол (пример 1).
Находим условие для третьего соотношения. Решаем уравнение:
Найденное условие выполняется, когда косинус угла между векторами больше косинуса
смежных углов. То есть, чтобы длина суммы векторов была меньше длины разности векторов,
необходимо, чтобы углы образовали тупой угол.
Пригодится: тригонометрическая таблица (синусы, косинусы, тангенсы и котангенсы распространенных углов)
Проверить решение можно на Калькуляторе
онлайн.
| Назад | Листать | Вперёд>>> |
Поделиться с друзьями
Начало темы «Векторы»
Продолжение темы «Векторы»
Вычисление направляющих векторов для прямых
Если вы внимательно прочитаете задачу C2, то с удивлением обнаружите, что никаких векторов там нет. Там только прямые да плоскости.
Для начала разберемся с прямыми. Здесь все просто: на любой прямой найдутся хотя бы две различные точки и, наоборот, любые две различные точки задают единственную прямую…
Кто-нибудь понял, что написано в предыдущем абзаце? Я и сам не понял, поэтому объясню проще: в задаче C2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим так называемый направляющий вектор для прямой:
Зачем нужен этот вектор? Дело в том, что угол между двумя прямыми — это угол между их направляющими векторами. Таким образом, мы переходим от непонятных прямых к конкретным векторам, координаты которых легко считаются. Насколько легко? Взгляните на примеры:
Поскольку длина ребер куба в условии не указана, положим AB = 1. Введем систему координат с началом в точке A и осями x, y, z, направленными вдоль прямых AB, AD и AA1 соответственно. Единичный отрезок равен AB = 1.
Теперь найдем координаты направляющего вектора для прямой AC. Нам потребуются две точки: A = (0; 0; 0) и C = (1; 1; 0). Отсюда получаем координаты вектора AC = (1 − 0; 1 − 0; 0 − 0) = (1; 1; 0) — это и есть направляющий вектор.
Теперь разберемся с прямой BD1. На ней также есть две точки: B = (1; 0; 0) и D1 = (0; 1; 1). Получаем направляющий вектор BD1 = (0 − 1; 1 − 0; 1 − 0) = (− 1; 1; 1).
Ответ: AC = (1; 1; 0); BD1 = (− 1; 1; 1)
Введем систему координат: начало в точке A, ось x совпадает с AB, ось z совпадает с AA1, ось y образует с осью x плоскость OXY, которая совпадает с плоскостью ABC.
Для начала разберемся с прямой AB1. Тут все просто: у нас есть точки A = (0; 0; 0) и B1 = (1; 0; 1). Получаем направляющий вектор AB1 = (1 − 0; 0 − 0; 1 − 0) = (1; 0; 1).
Теперь найдем направляющий вектор для AC1. Все то же самое — единственное отличие в том, что у точки C1 иррациональные координаты. Итак, A = (0; 0; 0), поэтому имеем:
![]()
Ответ: AB1 = (1; 0; 1);
Небольшое, но очень важное замечание насчет последнего примера. Если начало вектора совпадает с началом координат, вычисления резко упрощаются: координаты вектора просто равны координатам конца
К сожалению, это верно лишь для векторов. Например, при работе с плоскостями присутствие на них начала координат только усложняет выкладки.